Second fundamental form
In differential geometry, the second fundamental form (or shape tensor) is a quadratic form on the tangent plane of a smooth surface in the three-dimensional Euclidean space, usually denoted by (read "two"). Together with the first fundamental form, it serves to define extrinsic invariants of the surface, its principal curvatures. More generally, such a quadratic form is defined for a smooth immersed submanifold in a Riemannian manifold.

Surface in R3
Motivation
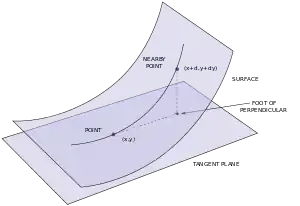
The second fundamental form of a parametric surface S in R3 was introduced and studied by Gauss. First suppose that the surface is the graph of a twice continuously differentiable function, z = f(x,y), and that the plane z = 0 is tangent to the surface at the origin. Then f and its partial derivatives with respect to x and y vanish at (0,0). Therefore, the Taylor expansion of f at (0,0) starts with quadratic terms:

and the second fundamental form at the origin in the coordinates (x,y) is the quadratic form

For a smooth point P on S, one can choose the coordinate system so that the coordinate z-plane is tangent to S at P and define the second fundamental form in the same way.
Classical notation
The second fundamental form of a general parametric surface is defined as follows. Let r = r(u,v) be a regular parametrization of a surface in R3, where r is a smooth vector-valued function of two variables. It is common to denote the partial derivatives of r with respect to u and v by ru and rv. Regularity of the parametrization means that ru and rv are linearly independent for any (u,v) in the domain of r, and hence span the tangent plane to S at each point. Equivalently, the cross product ru × rv is a nonzero vector normal to the surface. The parametrization thus defines a field of unit normal vectors n:

The second fundamental form is usually written as

its matrix in the basis {ru, rv} of the tangent plane is

The coefficients L, M, N at a given point in the parametric uv-plane are given by the projections of the second partial derivatives of r at that point onto the normal line to S and can be computed with the aid of the dot product as follows:

For a signed distance field of Hessian H, the second fundamental form coefficients can be computed as follows:

Physicist's notation
The second fundamental form of a general parametric surface S is defined as follows.
Let r = r(u1,u2) be a regular parametrization of a surface in R3, where r is a smooth vector-valued function of two variables. It is common to denote the partial derivatives of r with respect to uα by rα, α = 1, 2. Regularity of the parametrization means that r1 and r2 are linearly independent for any (u1,u2) in the domain of r, and hence span the tangent plane to S at each point. Equivalently, the cross product r1 × r2 is a nonzero vector normal to the surface. The parametrization thus defines a field of unit normal vectors n:

The second fundamental form is usually written as

The equation above uses the Einstein summation convention.
The coefficients bαβ at a given point in the parametric u1u2-plane are given by the projections of the second partial derivatives of r at that point onto the normal line to S and can be computed in terms of the normal vector n as follows:

Hypersurface in a Riemannian manifold
In Euclidean space, the second fundamental form is given by

where ν is the Gauss map, and dν the differential of ν regarded as a vector-valued differential form, and the brackets denote the metric tensor of Euclidean space.
More generally, on a Riemannian manifold, the second fundamental form is an equivalent way to describe the shape operator (denoted by S) of a hypersurface,

where ∇vw denotes the covariant derivative of the ambient manifold and n a field of normal vectors on the hypersurface. (If the affine connection is torsion-free, then the second fundamental form is symmetric.)
The sign of the second fundamental form depends on the choice of direction of n (which is called a co-orientation of the hypersurface - for surfaces in Euclidean space, this is equivalently given by a choice of orientation of the surface).
Generalization to arbitrary codimension
The second fundamental form can be generalized to arbitrary codimension. In that case it is a quadratic form on the tangent space with values in the normal bundle and it can be defined by

where (∇vw)⊥ denotes the orthogonal projection of covariant derivative ∇vw onto the normal bundle.
In Euclidean space, the curvature tensor of a submanifold can be described by the following formula:

This is called the Gauss equation, as it may be viewed as a generalization of Gauss's Theorema Egregium.
For general Riemannian manifolds one has to add the curvature of ambient space; if N is a manifold embedded in a Riemannian manifold (M,g) then the curvature tensor RN of N with induced metric can be expressed using the second fundamental form and RM, the curvature tensor of M:

See also
References
- Guggenheimer, Heinrich (1977). "Chapter 10. Surfaces". Differential Geometry. Dover. ISBN 0-486-63433-7.
- Kobayashi, Shoshichi & Nomizu, Katsumi (1996). Foundations of Differential Geometry, Vol. 2 (New ed.). Wiley-Interscience. ISBN 0-471-15732-5.
- Spivak, Michael (1999). A Comprehensive introduction to differential geometry (Volume 3). Publish or Perish. ISBN 0-914098-72-1.
External links
- Steven Verpoort (2008) Geometry of the Second Fundamental Form: Curvature Properties and Variational Aspects from Katholieke Universiteit Leuven.