Robinson projection
The Robinson projection is a map projection of a world map which shows the entire world at once. It was specifically created in an attempt to find a good compromise to the problem of readily showing the whole globe as a flat image.[1]


The Robinson projection was devised by Arthur H. Robinson in 1963 in response to an appeal from the Rand McNally company, which has used the projection in general-purpose world maps since that time. Robinson published details of the projection's construction in 1974. The National Geographic Society (NGS) began using the Robinson projection for general-purpose world maps in 1988, replacing the Van der Grinten projection.[2] In 1998 NGS abandoned the Robinson projection for that use in favor of the Winkel tripel projection, as the latter "reduces the distortion of land masses as they near the poles".[3][4]
Strengths and weaknesses
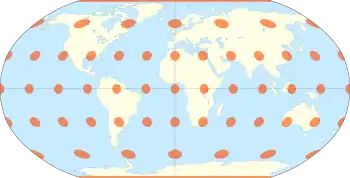
The Robinson projection is neither equal-area nor conformal, abandoning both for a compromise. The creator felt that this produced a better overall view than could be achieved by adhering to either. The meridians curve gently, avoiding extremes, but thereby stretch the poles into long lines instead of leaving them as points.[1]
Hence, distortion close to the poles is severe, but quickly declines to moderate levels moving away from them. The straight parallels imply severe angular distortion at the high latitudes toward the outer edges of the map – a fault inherent in any pseudocylindrical projection. However, at the time it was developed, the projection effectively met Rand McNally's goal to produce appealing depictions of the entire world.[5][6]
I decided to go about it backwards. … I started with a kind of artistic approach. I visualized the best-looking shapes and sizes. I worked with the variables until it got to the point where, if I changed one of them, it didn't get any better. Then I figured out the mathematical formula to produce that effect. Most mapmakers start with the mathematics.
Formulation
The projection is defined by the table:[7][8][9]
Latitude X Y 0° 1.0000 0.0000 5° 0.9986 0.0620 10° 0.9954 0.1240 15° 0.9900 0.1860 20° 0.9822 0.2480 25° 0.9730 0.3100 30° 0.9600 0.3720 35° 0.9427 0.4340 40° 0.9216 0.4958 45° 0.8962 0.5571 50° 0.8679 0.6176 55° 0.8350 0.6769 60° 0.7986 0.7346 65° 0.7597 0.7903 70° 0.7186 0.8435 75° 0.6732 0.8936 80° 0.6213 0.9394 85° 0.5722 0.9761 90° 0.5322 1.0000
The table is indexed by latitude at 5-degree intervals; intermediate values are calculated using interpolation. Robinson did not specify any particular interpolation method, but it is reported that he used Aitken interpolation himself.[10] The X column is the ratio of the length of the parallel to the length of the equator; the Y column can be multiplied by 0.2536[11] to obtain the ratio of the distance of that parallel from the equator to the length of the equator.[7][9]
Coordinates of points on a map are computed as follows:[7][9]

where R is the radius of the globe at the scale of the map, λ is the longitude of the point to plot, and λ0 is the central meridian chosen for the map (both λ and λ0 are expressed in radians).
Simple consequences of these formulas are:
- With x computed as constant multiplier to the meridian across the entire parallel, meridians of longitude are thus equally spaced along the parallel.
- With y having no dependency on longitude, parallels are straight horizontal lines.
Applications
The European Centre for Disease Prevention and Control recommends using the Robinson projection for mapping the whole world.[12]
References
- John Noble Wilford (October 25, 1988). "The Impossible Quest for the Perfect Map". The New York Times. Retrieved 1 May 2012.
- Snyder, John P. (1993). Flattening the Earth: 2000 Years of Map Projections. University of Chicago Press. p. 214. ISBN 0226767469.
- "National Geographic Maps – Wall Maps – World Classic (Enlarged)". National Geographic Society. Retrieved 2019-02-17.
This map features the Winkel Tripel projection to reduce distortion of land masses as they near the poles.
- "Selecting a Map Projection". National Geographic Society. Retrieved 2019-02-17.
- Myrna Oliver (November 17, 2004). "Arthur H. Robinson, 89; Cartographer Hailed for Map's Elliptical Design". Los Angeles Times. Retrieved 1 May 2012.
- New York Times News Service (November 16, 2004). "Arthur H. Robinson, 89 Geographer improved world map". Chicago Tribune. Retrieved 1 May 2012.
- Ipbuker, C. (July 2005). "A Computational Approach to the Robinson Projection". Survey Review. 38 (297): 204–217. doi:10.1179/sre.2005.38.297.204. S2CID 123437786. Retrieved 2019-02-17.
- "Table for Constructing the Robinson Projection". RadicalCartography.net. Retrieved 2019-02-17.
- Snyder, John P.; Voxland, Philip M. (1989). "An Album of Map Projections" (PDF). U.S. Geological Survey Professional Paper 1453. Washington, D.C.: U.S. Government Printing Office. pp. 82–83, 222–223. doi:10.3133/pp1453. Retrieved 2019-02-18. Missing or empty
|title=(help) - Richardson, R. T. (1989). "Area deformation on the Robinson projection". The American Cartographer. 16 (4): 294–296. doi:10.1559/152304089783813936.
- From the formulas below, this can be calculated as .
- European Centre for Disease Prevention and Control. (2018). Guidelines for presentation of surveillance data: tables graphs maps. LU: Publications Office. doi:10.2900/452488.

Further reading
- Arthur H. Robinson (1974). "A New Map Projection: Its Development and Characteristics". In: International Yearbook of Cartography. Vol 14, 1974, pp. 145–155.
- John B. Garver Jr. (1988). "New Perspective on the World". In: National Geographic, December 1988, pp. 911–913.
- John P. Snyder (1993). Flattening The Earth—2000 Years of Map Projections, The University of Chicago Press. pp. 214–216.
External links
| Wikimedia Commons has media related to Maps with Robinson projection. |
- Table of examples and properties of all common projections, from radicalcartography.net
- Numerical evaluation of the Robinson projection, from Cartography and Geographic Information Science, April, 2004 by Cengizhan Ipbuker