Rim-driven thruster
Rim-driven thruster is a novel type of propulsion unit which was presented at the Shipbuilding, Machinery & Marine Technology 2010 trade fair (SMM) by the companies Voith and Van der Velden.

.png.webp)
Principle
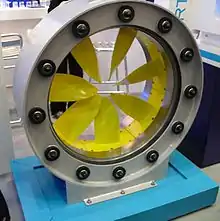
The rim-driven thruster is a marine propeller which does not need a hub for transmission of the driving torque. Conventional propellers need a shaft line which is driven by a turbine, a diesel engine or an electric motor. The more recent podded drives consist of a conventional propeller which is arranged together with a conventional electric motor into an azimuthable gondola under water.
The blades of the rim-driven thruster are mounted on a ring which constitutes the rotor of an electric motor. It is surrounded by the stator which is also ring-shaped and creates the necessary torque. Rotor and stator are water tight and the whole unit operates submerged. Similar to an azipod, a rim-driven thruster can be designed fixed, retractable and/or azimuthing.
Advantages and disadvantages
The largest advantage of this building principle is its minimal noise emissions and the low space requirement. It enables relatively simple integration in many applications. Since the rotor is driven directly by the electro-magnetic forces, no shaft and no gearbox is needed. Sealing of moving parts is not necessary, rotor and stator can be sealed hermetically. Since the blades are mounted to the rotor ring, there is no tip gap. This, together with the gearbox removes prominent sources of noise. Rim-driven thrusters are therefore characterized by an extremely low level of noise emissions.
Disadvantage is a reduced efficiency due to increased friction losses in the gap between rotor and stator.
See also
- Manoeuvring thruster
- Azimuth thruster
- Azipod
- Z-drive
- Cycloidal drive
- Reaction control system – Spacecraft thrusters used to provide attitude control and translation