Cramer's rule
In linear algebra, Cramer's rule is an explicit formula for the solution of a system of linear equations with as many equations as unknowns, valid whenever the system has a unique solution. It expresses the solution in terms of the determinants of the (square) coefficient matrix and of matrices obtained from it by replacing one column by the column vector of right-hand-sides of the equations. It is named after Gabriel Cramer (1704–1752), who published the rule for an arbitrary number of unknowns in 1750,[1][2] although Colin Maclaurin also published special cases of the rule in 1748[3] (and possibly knew of it as early as 1729).[4][5][6]
Cramer's rule implemented in a naïve way is computationally inefficient for systems of more than two or three equations.[7] In the case of n equations in n unknowns, it requires computation of n + 1 determinants, while Gaussian elimination produces the result with the same computational complexity as the computation of a single determinant.[8][9] Cramer's rule can also be numerically unstable even for 2×2 systems.[10] However, it has recently been shown that Cramer's rule can be implemented in O(n3) time,[11] which is comparable to more common methods of solving systems of linear equations, such as Gaussian elimination (consistently requiring 2.5 times as many arithmetic operations for all matrix sizes), while exhibiting comparable numeric stability in most cases.
General case
Consider a system of n linear equations for n unknowns, represented in matrix multiplication form as follows:

where the n × n matrix A has a nonzero determinant, and the vector is the column vector of the variables. Then the theorem states that in this case the system has a unique solution, whose individual values for the unknowns are given by:


where is the matrix formed by replacing the i-th column of A by the column vector b.

A more general version of Cramer's rule[12] considers the matrix equation

where the n × n matrix A has a nonzero determinant, and X, B are n × m matrices. Given sequences and , let be the k × k submatrix of X with rows in and columns in . Let be the n × n matrix formed by replacing the column of A by the column of B, for all . Then










In the case , this reduces to the normal Cramer's rule.

The rule holds for systems of equations with coefficients and unknowns in any field, not just in the real numbers.
Proof
The proof for Cramer's rule uses the following properties of the determinants: linearity with respect to any given column and the fact that the determinant is zero whenever two columns are equal, which is implied by the property that the sign of the determinant flips if you switch two columns.
Fix the index j of a column. Linearity means that if we consider only column j as variable (fixing the others arbitrarily), the resulting function Rn → R (assuming matrix entries are in R) can be given by a matrix, with one row and n columns, that acts on column j. In fact this is precisely what Laplace expansion does, writing det(A) = C1a1,j + ... + Cnan,j for certain coefficients C1, ..., Cn that depend on the columns of A other than column j (the precise expression for these cofactors is not important here). The value det(A) is then the result of applying the one-line matrix L(j) = (C1 C2 ... Cn) to column j of A. If L(j) is applied to any other column k of A, then the result is the determinant of the matrix obtained from A by replacing column j by a copy of column k, so the resulting determinant is 0 (the case of two equal columns).
Now consider a system of n linear equations in n unknowns , whose coefficient matrix is A, with det(A) assumed to be nonzero:


If one combines these equations by taking C1 times the first equation, plus C2 times the second, and so forth until Cn times the last, then the coefficient of xj will become C1a1, j + ... + Cnan,j = det(A), while the coefficients of all other unknowns become 0; the left hand side becomes simply det(A)xj. The right hand side is C1b1 + ... + Cnbn, which is L(j) applied to the column vector b of the right hand side bi. In fact what has been done here is multiply the matrix equation Ax = b on the left by L(j). Dividing by the nonzero number det(A) one finds the following equation, necessary to satisfy the system:

But by construction the numerator is the determinant of the matrix obtained from A by replacing column j by b, so we get the expression of Cramer's rule as a necessary condition for a solution. The same procedure can be repeated for other values of j to find values for the other unknowns.
The only point that remains to prove is that these values for the unknowns, the only possible ones, do indeed together form a solution. But if the matrix A is invertible with inverse A−1, then x = A−1b will be a solution, thus showing its existence. To see that A is invertible when det(A) is nonzero, consider the n × n matrix M obtained by stacking the one-line matrices L(j) on top of each other for j = 1, ..., n (this gives the adjugate matrix for A). It was shown that L(j)A = (0 ... 0 det(A) 0 ... 0) where det(A) appears at the position j; from this it follows that MA = det(A)In. Therefore,

completing the proof.
For other proofs, see below.
Finding inverse matrix
Let A be an n × n matrix with entries in a field F. Then

where adj(A) denotes the adjugate matrix, det(A) is the determinant, and I is the identity matrix. If det(A) is nonzero, then the inverse matrix of A is

.This gives a formula for the inverse of A, provided det(A) ≠ 0. In fact, this formula works whenever F is a commutative ring, provided that det(A) is a unit. If det(A) is not a unit, then A is not invertible over the ring (it may be invertible over a larger ring in which some non-unit elements of F may be invertible).
Applications
Explicit formulas for small systems
Consider the linear system

which in matrix format is

Assume a1b2 − b1a2 nonzero. Then, with help of determinants, x and y can be found with Cramer's rule as

The rules for 3 × 3 matrices are similar. Given

which in matrix format is

Then the values of x, y and z can be found as follows:

Ricci calculus
Cramer's rule is used in the Ricci calculus in various calculations involving the Christoffel symbols of the first and second kind.[13]
In particular, Cramer's rule can be used to prove that the divergence operator on a Riemannian manifold is invariant with respect to change of coordinates. We give a direct proof, suppressing the role of the Christoffel symbols. Let be a Riemannian manifold equipped with local coordinates . Let be a vector field. We use the summation convention throughout.



- Theorem.
- The divergence of ,
- is invariant under change of coordinates.


Proof |
|---|
|
Let be a coordinate transformation with non-singular Jacobian. Then the classical transformation laws imply that where . Similarly, if , then . Writing this transformation law in terms of matrices yields , which implies . Now one computes In order to show that this equals , it is necessary and sufficient to show that which is equivalent to Carrying out the differentiation on the left-hand side, we get: where denotes the matrix obtained from by deleting the th row and th column. But Cramer's Rule says that is the th entry of the matrix . Thus completing the proof. |




















Computing derivatives implicitly
Consider the two equations and . When u and v are independent variables, we can define and




An equation for can be found by applying Cramer's rule.

Calculation of |
|---|
|
First, calculate the first derivatives of F, G, x, and y: Substituting dx, dy into dF and dG, we have: Since u, v are both independent, the coefficients of du, dv must be zero. So we can write out equations for the coefficients: Now, by Cramer's rule, we see that: This is now a formula in terms of two Jacobians: Similar formulas can be derived for |






Integer programming
Cramer's rule can be used to prove that an integer programming problem whose constraint matrix is totally unimodular and whose right-hand side is integer, has integer basic solutions. This makes the integer program substantially easier to solve.
Ordinary differential equations
Cramer's rule is used to derive the general solution to an inhomogeneous linear differential equation by the method of variation of parameters.
Geometric interpretation

Cramer's rule has a geometric interpretation that can be considered also a proof or simply giving insight about its geometric nature. These geometric arguments work in general and not only in the case of two equations with two unknowns presented here.
Given the system of equations

it can be considered as an equation between vectors

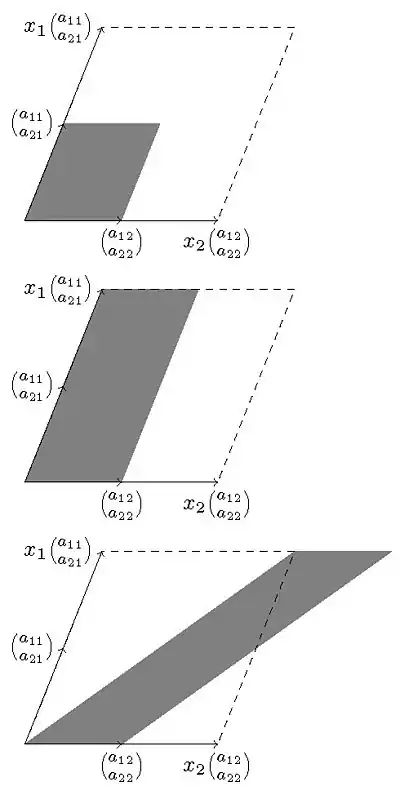
The area of the parallelogram determined by and is given by the determinant of the system of equations:



In general, when there are more variables and equations, the determinant of n vectors of length n will give the volume of the parallelepiped determined by those vectors in the n-th dimensional Euclidean space.
Therefore, the area of the parallelogram determined by and has to be times the area of the first one since one of the sides has been multiplied by this factor. Now, this last parallelogram, by Cavalieri's principle, has the same area as the parallelogram determined by and



Equating the areas of this last and the second parallelogram gives the equation

from which Cramer's rule follows.
Other proofs
A proof by abstract linear algebra
This is a restatement of the proof above in abstract language.
Consider the map where is the matrix with substituted in the th column, as in Cramer's rule. Because of linearity of determinant in every column, this map is linear. Observe that it sends the th column of to the th basis vector (with 1 in the th place), because determinant of a matrix with a repeated column is 0. So we have a linear map which agrees with the inverse of on the column space; hence it agrees with on the span of the column space. Since is invertible, the column vectors span all of , so our map really is the inverse of . Cramer's rule follows.





A short proof
A short proof of Cramer's rule [14] can be given by noticing that is the determinant of the matrix

On the other hand, assuming that our original matrix A is invertible, this matrix has columns , where is the n-th column of the matrix A. Recall that the matrix has columns , and therefore . Hence, by using that the determinant of the product of two matrices is the product of the determinants, we have







The proof for other is similar.

Incompatible and indeterminate cases
A system of equations is said to be incompatible or inconsistent when there are no solutions and it is called indeterminate when there is more than one solution. For linear equations, an indeterminate system will have infinitely many solutions (if it is over an infinite field), since the solutions can be expressed in terms of one or more parameters that can take arbitrary values.
Cramer's rule applies to the case where the coefficient determinant is nonzero. In the 2×2 case, if the coefficient determinant is zero, then the system is incompatible if the numerator determinants are nonzero, or indeterminate if the numerator determinants are zero.
For 3×3 or higher systems, the only thing one can say when the coefficient determinant equals zero is that if any of the numerator determinants are nonzero, then the system must be incompatible. However, having all determinants zero does not imply that the system is indeterminate. A simple example where all determinants vanish (equal zero) but the system is still incompatible is the 3×3 system x+y+z=1, x+y+z=2, x+y+z=3.
References
- Cramer, Gabriel (1750). "Introduction à l'Analyse des lignes Courbes algébriques" (in French). Geneva: Europeana. pp. 656–659. Retrieved 2012-05-18.
- Kosinski, A. A. (2001). "Cramer's Rule is due to Cramer". Mathematics Magazine. 74: 310–312. doi:10.2307/2691101.
- MacLaurin, Colin (1748). A Treatise of Algebra, in Three Parts.
- Boyer, Carl B. (1968). A History of Mathematics (2nd ed.). Wiley. p. 431.
- Katz, Victor (2004). A History of Mathematics (Brief ed.). Pearson Education. pp. 378–379.
- Hedman, Bruce A. (1999). "An Earlier Date for "Cramer's Rule"" (PDF). Historia Mathematica. 26 (4): 365–368. doi:10.1006/hmat.1999.2247.
- David Poole (2014). Linear Algebra: A Modern Introduction. Cengage Learning. p. 276. ISBN 978-1-285-98283-0.
- Joe D. Hoffman; Steven Frankel (2001). Numerical Methods for Engineers and Scientists, Second Edition,. CRC Press. p. 30. ISBN 978-0-8247-0443-8.
- Thomas S. Shores (2007). Applied Linear Algebra and Matrix Analysis. Springer Science & Business Media. p. 132. ISBN 978-0-387-48947-6.
- Nicholas J. Higham (2002). Accuracy and Stability of Numerical Algorithms: Second Edition. SIAM. p. 13. ISBN 978-0-89871-521-7.
- Ken Habgood; Itamar Arel (2012). "A condensation-based application of Cramerʼs rule for solving large-scale linear systems" (PDF). Journal of Discrete Algorithms. 10: 98–109. doi:10.1016/j.jda.2011.06.007.
- Zhiming Gong; M. Aldeen; L. Elsner (2002). "A note on a generalized Cramer's rule". Linear Algebra and its Applications. 340: 253–254. doi:10.1016/S0024-3795(01)00469-4.
- Levi-Civita, Tullio (1926). The Absolute Differential Calculus (Calculus of Tensors). Dover. pp. 111–112. ISBN 9780486634012.
- Robinson, Stephen M. (1970). "A Short Proof of Cramer's Rule". Mathematics Magazine. 43: 94–95.
External links
| Wikibooks has a book on the topic of: Linear Algebra/Cramer's Rule |
- Proof of Cramer's Rule
- WebApp descriptively solving systems of linear equations with Cramer's Rule
- Online Calculator of System of linear equations
- Wolfram MathWorld explanation on this subject
| Basic concepts |  | |
|---|---|---|
| Matrices | ||
| Bilinear | ||
| Multilinear algebra | ||
| Vector space constructions | ||
| Numerical | ||
| ||